
异步电动机矢量控制系统中,为什么要设置直角坐标l极坐标变换器、矢量旋转器和3相12相变换器?它们的作用是什么?
第1题:
工业机器人按坐标形式可分为( )等机器人类型。
A.直角坐标、圆柱坐标和极坐标
B.圆柱坐标、极坐标和关节坐标
C.直角坐标、圆柱坐标、极坐标和关节坐标
D.关节坐标、直角坐标和圆柱坐标
第2题:

函数文件:
文件名:transform
程序:
function[r,theta]=transform(x,y)
r=sqrt(x*x+y*y);
theta=atan(y/x);
函数调用:
程序:
x=input(’Pleaseinputx=:’);
y=input(’Pleaseinputy=:’);
[r,theta]=transform(x,y);
disp([’矢径r为:’,num2str(r),’’,’极角theta为:’,num2str(theta)])
第3题:
A、两者都是正交坐标系;
B、直角坐标中,x和y坐标线都是直线,有固定的方向,x和y的量纲均为L;
C、极坐标中,ρ坐标线(φ=常数)和φ坐标线(ρ=常数)在不同点有不同的方向
D、极坐标中,ρ坐标线为直线,φ坐标线为圆弧曲线;ρ的量纲为L,φ的量纲为1。
第4题:
工业机器人按坐标形式可分为()等机器人类型。
第5题:
为什么要设置低压控制系统?
众所周知,一台电除尘器使用效果如何,除了设计先进、合理的电除尘器(本体)和控制特性优良的高压供电装置之外,还必须有一整套低压控制系统与它们密切配合,这样才能获得预期的收尘效果。近几十年来,我国的电除尘技术落发展迅速,理论和实践充分证明,低压控制系统成了电除尘系统必不可少的三大组成之一。它是一种多功能的自动控制系统,这种系统控制特性的好坏和控制功能完善与否,对于提高电除尘器运行的自动化程度,改善运行状况,减轻维护人员的劳动强度,提高电除尘器的除尘效率,都有着直接的影响。
略
第6题:
在施工测量中测设点的平面位置,根据地形条件和施工控制点的布设,可采用()。
A、直角坐标法、极坐标法、交会法
B、直角坐标法、高斯坐标法、交会法
C、直角坐标法、极坐标法、空间坐标法
D、直角坐标法、极坐标法、高程法
第7题:
 ,则L在点
,则L在点 处的切线的直角坐标方程是________
处的切线的直角坐标方程是________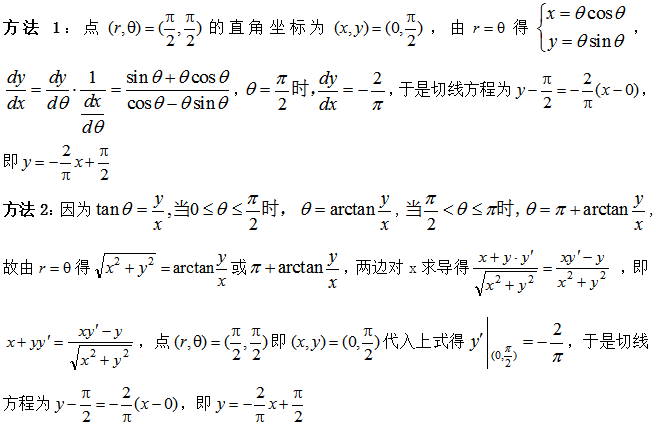
第8题:
A、绝对直角坐标
B、相对直角坐标
C、绝对极坐标
D、相对极坐标
E、用户坐标
第9题:
在曲线测设中,坐标法包括()。
第10题:
“极坐标”滤镜可以将图像坐标从极坐标系转化成直角坐标系。