
从属系数
权重
比例系数
隶属度
第1题:
在matlab中可以对矩阵的单个元素、子矩阵块和所有元素进行删除操作,就是简单的将其赋值为空矩阵。()
第2题:
阅读以下说明和C函数,将应填入(n)处的字句写在对应栏内。
[说明]
若一个矩阵中的非零元素数目很少且分布没有规律,则称之为稀疏矩阵。对m行n列的稀疏矩阵M,进行转置运算后得到n行m列的矩阵MT,如图3-1所示
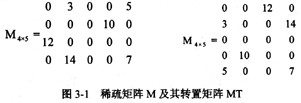
为了压缩稀疏矩阵的存储空间,用三元组(即元素所在的行号、列号和元素值、表示稀疏矩阵中的一个非零元素,再用一维数组逐行存储稀疏矩阵中的所有非零元素也称为三元组顺序表)。例如,图3-1所示的矩阵M相应的三元组顺序表如表3-1所示。其转置矩阵MT的三元组顺序表如表3-2所示。

函数TransposeMatrix(Matrix M)的功能是对用三元组顺序表表示的稀疏矩阵M进行转置运算。
对M实施转置运算时,为了将M中的每个非零元素直接存入其转置矩阵MT三元组顺序表的相应位置,需先计算M中每一列非零元素的数目(即MT中每一行非零元素的数目),并记录在向量num中;然后根据以下关系,计算出矩阵M中每列的第一个非零元素在转置矩阵MT三元组顺序表中的位置:
cpot[0]=0
cpot[j]=cpot[j-1]+num[j-1]) /*j为列号*/
类型ElemType,Triple和Matrix定义如下:
typedef int ElemType;
typedef struct{ /*三元组类型*/
int r,c; /*矩阵元素的行号、列号*/
ElemType e; /*矩阵元素的值*/
}Triple;
typedef struct{ /*矩阵的元组三元组顺序表存储结构*/
int rows,cols,elements; /*矩阵的行数、列数和非零元素数目*/
Triple data[MAXSIZE];
}Matrix;
[C语言函数]
int TransposeMatrix(Matrix M)
{
int j,q,t;
int *num, *cpot;
Matrix MT; /*MT是M的转置矩阵*/
num=(int*)malloc(M.cols*sizeof(int));
cpot=(int*)malloc(M.cols*sizeof(int));
if(!num ||cpot)
return ERROR;
MT.rows=(1); /*设置转置矩阵MT行数、列数和非零元素数目*/
MT.cols=(2);
MT.elements=M.elements;
if(M.elements>0){
for (q=0 ; q<M. cols ; q++)
num[q]=0;
for (t=0; t<M.elements;++t) /*计算矩阵M中每一列非零元素数目*/
num [M.data[t].c]++;
/*计算矩阵M中每列第一个非零元素在其转置矩阵三元组顺序表中的位置*/
(3);
for(j=1;j<M.cols;j++)
cpot[j]=(4);
/*以下代码完成转置矩阵MT三元组顺序表元素的设置*/
for(t=0;t<M.elements;t++){
j=(5); /*取矩阵M的一个非零元素的列号存入j*/
/*q为该非零元素在转置矩阵MT三元组顺序表中的位置(下标)*/
q=cpot[j];
MT.data[q].r=M.data[t].c;
MT.data[q].c=M.data[t].r;
MT.data[q].e=M.data[t].e;
++cpot[j]; /*计算M中第j列的下一个非零元素的目的位置*/
}/*for*/
} /*if*/
free(num); free(cpot);
/*此处输出矩阵元素,代码省略*/
return OK;
}/*TransposeMatrix*/
第3题:
设关系R和关系S的元素分别是3和4,关系T是R与S的笛卡尔积,即:T=RxS,则关系T的元素是
A.7
B.9
C.12
D.16
第4题:
特殊矩阵是非零元素有规律分布的矩阵,以下关于特殊矩阵的叙述中,正确的是( )。
A.特殊矩阵适合采用双向链表进行压缩存储 B.特殊矩阵适合采用单向循环链表进行压缩存储 C.特殊矩阵的所有非零元素可以压缩存储在一维数组中 D.特殊矩阵的所有零元素可以压缩存储在一维数组中
第5题:
设关系R和S的元素分别是10和10,且R有20个元组,S有10个元组。执行关系R 和S的笛卡儿积,记为T=R×S,则( )。A.T的元素是20,且有20个元组B.T的元素是20,且有200个元组C.T的元素是100,且有100个元组D.T的元素是100,且有300个元组
第6题:
对于稀疏矩阵常用的三元组法存储时,不反映稀疏矩阵中同行或同列元素的关系,它可以反映出______个数。
第7题:
关于矩阵与像素的关系叙述错误的是
A、像素即矩阵中的元素
B、像素大小=视野大小/矩阵大小
C、当视野一定时,矩阵越大,像素尺寸越小
D、矩阵不变时增大视野会减小像素尺寸
E、数字图像由有限个像素点构成
第8题:
下列关于矩阵图的说法错误的有( )。
A.矩阵图是从问题的各种关系中找出成对要素L1,L2,L3,…,Li…,Lm和R1,R2, R3,…,Ri…,Rn,用数学上矩阵的形式排成行和列,在其交点上标示出L和R各因素之间的相互关系,从中确定关键点的方法
B.在分析质量问题的原因、整理顾客需求、分解质量目标时,将问题、顾客需求、质量目标放在矩阵图的上边
C.将问题的原因、顾客需求转化来的质量目标或针对质量目标提出的质量措施列在矩阵图的左边
D.在矩阵图中,通常用◎表示关系密切
E.在矩阵图中,通常用△表示可能有关系
第9题:
设有关系R和关系S的元素个数分别是3和4,关系T是R与5的广义笛卡儿积,即 T=R*S,则关系T的元素个数是( )。
A.6
B.8
C.10
D.12
第10题:
试题三(共15分)
阅读以下说明和C 函数,将应填入(n) 处的字句写在答题纸的对应栏内。
[说明]
若一个矩阵中的非零元素数目很少且分布没有规律,则称之为稀疏矩阵。对于m行n 列的稀疏矩阵M,进行转置运算后得到n 行m列的矩阵MT,如图3-1 所示。

函数TransposeMatrix(Matrix M)的功能是对用三元组顺序表表示的稀疏矩阵M 进行转置运算。
对 M 实施转置运算时,为了将M 中的每个非零元素直接存入其转置矩阵MT 三元组顺序表的相应位置,需先计算M 中每一列非零元素的数目(即MT 中每一行非零元素的数目),并记录在向量num 中;然后根据以下关系,计算出矩阵M 中每列的第一个非零元素在转置矩阵MT 三元组顺序表中的位置:
cpot[0] = 0
cpot[j] = cpot[j-1] + num[j-1] /* j 为列号 */
类型ElemType、Triple 和Matrix 定义如下:
typedef int ElemType;
typedef struct { /* 三元组类型 */
int r,c; /* 矩阵元素的行号、列号*/
ElemType e; /* 矩阵元素的值*/
}Triple;
typedef struct { /* 矩阵的三元组顺序表存储结构 */
int rows,cols,elements; /* 矩阵的行数、列数和非零元素数目 */
Triple data[MAXSIZE];
}Matrix;
[C函数]
int TransposeMatrix(Matrix M)
{
int j,q,t;
int *num, *cpot;
Matrix MT; /* MT 是M的转置矩阵 */
num = (int *)malloc(M.cols*sizeof(int));
cpot = (int *)malloc(M.cols*sizeof(int));
if (!num || !cpot)
return ERROR;
MT.rows = (1) ; /* 设置转置矩阵MT行数、列数和非零元数目*/
MT.cols = (2) ;
MT.elements = M.elements;
if (M.elements > 0) {
for(q = 0; q < M.cols; q++)
num[q] = 0;
for(t = 0; t < M.elements; ++t) /* 计算矩阵M 中每一列非零元素数目*/
num[M.data[t].c]++;
/* 计算矩阵M中每列第一个非零元素在其转置矩阵三元组顺序表中的位置*/
(3) ;
for(j = 1;j < M.cols; j++)
cpot[j] = (4) ;
/* 以下代码完成转置矩阵MT三元组顺序表元素的设置 */
for(t = 0; t < M.elements;t++){
j = (5) ; /* 取矩阵M 的一个非零元素的列号存入j */
/* q 为该非零元素在转置矩阵MT 三元组顺序表中的位置(下标)*/
q = cpot[j];
MT.data[q].r = M.data[t].c;
MT.data[q].c = M.data[t].r;
MT.data[q].e = M.data[t].e;
++cpot[j]; /* 计算M 中第j列的下一个非零元素的目的位置 */
}/* for */
}/* if */
free(num); free(cpot);
/*此处输出矩阵元素,代码省略*/
return OK;
}/* TransposeMatrix */