通解
特解
是解,但既非通解也非特解
不是解
第1题:
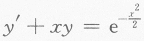
A.线性定常微分方程
B.非线性微分方程
C.非线性时变微分方程
D.线性时变微分方程
第2题:
第3题:
A: 平衡微分方程
B: 几何方程
C: 物理关系
D: 平衡微分方程、几何方程和物理关系
第4题:
第5题:
第6题:
第7题:
第8题:
第9题:
第10题:
自动控制系统在时域里的数学模型是()。
传递函数与微分方程之间具有相通性,相互转换的前提是()。
()是经典控制理论中最基本也是最重要的概念。A、传递函数B、频率法C、根轨迹法D、微分方程
判断题在微分方程中出现的未知函数的最高阶导函数的阶数被称为微分方程的阶。A 对B 错
线性常微分方程中的自由项是()。A、含有未知函数的项B、含有未知函数的导数的项C、既含有未知函数又含有未知函数的导数的项D、既不含有未知函数又不含有其各阶导数的项
方程中出现的未知函数及其各阶导数都是一次幂形式的微分方程称为线性微分方程。
对()进行拉普拉斯变换,可以得到系统在复数域的数字模型称为传递函数。A、线性定常微分方程B、非线性微分方程C、非线性时变微分方程D、线性时变微分方程
填空题设函数y=f(x)具有二阶导数,且f′(x)=f(π/2-x),则该函数满足的微分方程为____。
常用的数学模型有()。A、微分方程B、传递函数C、结构图D、信号流图
单选题线性常微分方程中的自由项是()。A 含有未知函数的项B 含有未知函数的导数的项C 既含有未知函数又含有未知函数的导数的项D 既不含有未知函数又不含有其各阶导数的项
下列有关控制系统的数学模型描述错误的是()。A、微分方程是在时间域内描述系统动态性能的数学模型B、线性微分方程经过拉氏变换,即可得到传递函数C、根轨迹法是建立在传递函数模型基础上的D、传递函数仅可以表征系统的动态性能

 问该方程的通解是下列函数中的哪个?
问该方程的通解是下列函数中的哪个?

 化为可分离变量方程求通解。
化为可分离变量方程求通解。






 满足条件y(0)=0的特解.
满足条件y(0)=0的特解.