IEC60870-5-104传输k、w和t0、t1、t2、t3分别是什么参数?
第1题:

第2题:
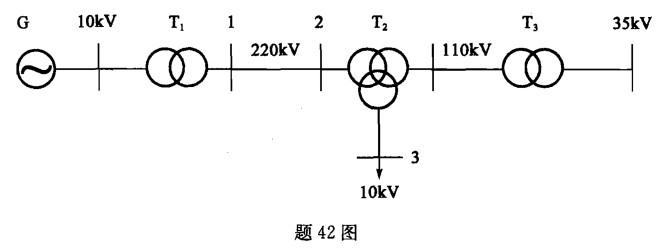
事务T1,T2,T3分别对数据D1,D2,D3并发操作如下图所示,其中T1与T2问的并发操作存在的问题是 (1) 。T2与T3问的并发操作存在的问题是 (2) 。

1.
第3题:
若系统中存在4个等待事务T0、T1、T2、T3,其中T0正等待被T1锁住的数据项Al,T1正等待被T2锁住的数据项A2,T2正等待被T3锁住的数据项A3,T3正等待被T0锁住的数据项A0。根据上述描述,系统所处的状态是
A.活锁
B.死锁
C.封锁
D.正常
第4题:
若系统中存在5个等待事务T0,T1,T2,T3,T4,其中:T0正等待被T1锁住的数据项A1, T1正等待被T2锁住的数据项A2,T2正等待被T3锁住的数据项A3,T3正等待被T4锁住的数据项A4,T4正等待被T0锁住的数据项A0,则系统处于(46)的工作状态。
A.并发处理
B.封锁
C.循环
D.死锁
第5题:
【说明】
现有一个事务集{T1,T2,T3,T4),其中这四个事务在运行过程中需要读写X、Y和Z。设Ti对X的读操作记作TiR(X),Ti对X的写操作记作Tiw(X)。
事务对XYZ的访问情况如下:
T1: T1R(X)
T2: T2R(Y),T2w(X)
T3: T3w(Y),T3w(X),T3w(Z)
T4: T4R(Z),T4w(X)
试述事务并发高度的正确性准则及其内容。
第6题:
事务T1、T2、T3分别对数据D1、D2和D3并发操作如下所示,其中T1与T2间并发操作(14),T2与T3间并发操作(15)。
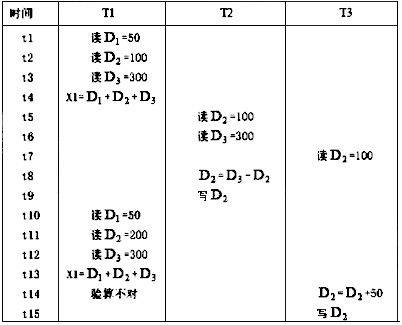
A.不存在问题
B.将丢失修改
C.不能重复读
D.将读“脏”数据
第7题:
有如下函数模板定义: template <typename T1,typename T2,typename T3> T2 plus(T1 t1,T3 t3){return t1+t3;}
A.plus(3,5L);
B.plus<>(3,5L);
C.plus<int>(3,5L);
D.plus<int, double>(3,5L);
第8题:
事务T0、T1和T2并发访问数据项A、B和C,下列属于冲突操作的是______。
A)T0中的read
(A)和T0中的write(A)
B)T0中的read
(B)和T2中的read
(C)
C)T0中的write(A)和T2中的write(C)
D)T1中的read(C)和T2中的write
A.
B.
C.
D.
第9题:
现有3个同时到达的作J1、J2和J3,它们的执行时间分别是T1 、T2 和T3 ,且 T1<T2<T3。系统按单道方式运行且采用短作业优先算法,则平均周转时间是______。
A.T1 +T2 +T3
B.(T1 +T2 +T3 ) /3
C.(3T1 +2T2 +T3 ) /3
D.(T1 +2T2 +3T3 ) /3
第10题: