
肘关节
膝关节
腕关节
肩关节
第1题:
下列有关自由度的表述正确的有( )。
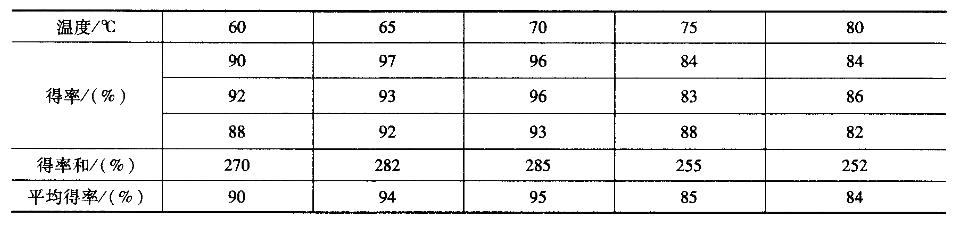
A.因子离差平方和的自由度是2
B.因子离差平方和的自由度是4
C.误差离差平方和的自由度是10
D.误差离差平方和的自由度是12
第2题:
此题为判断题(对,错)。
第3题:
A、自由度
B、动作时间
C、关节数
D、传感器性能
第4题:
相律是表示在平衡条件下,系统的自由度、组元数和()之间的关系。
第5题:
 ,请利用以上数据分析下列问题。
,请利用以上数据分析下列问题。
第6题:
属于1个自由度的关节为
A、肩关节
B、肘关节
C、腕关节
D、掌指关节
E、指间关节
第7题:
指间关节的自由度为
A、1个自由度
B、2个自由度
C、3个自由度
D、4个自由度
E、5个自由度
第8题:
肩关节运动有
A、1个自由度
B、2个自由度
C、3个自由度
D、4个自由度
E、5个自由度
第9题:
第10题:
工业机器人是面向工业领域的多关节机械手或多自由度的自动装置。