
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。
A.3
B.4
C.5
D.6
第1题:
【填空题】球坐标型机器人的手臂按球坐标形式配置。它的运动有()个直线和()个转动构成。
第2题:
60、球坐标型机器人的手臂按球坐标形式配置,其手臂的运动由[填空(1)] 个直线运动2个转动所组成。
第3题:
球坐标型机器人的手臂按球坐标形式配置,其手臂的运动由[填空(1)] 个直线运动2个转动所组成。
第4题:
第5题:
第6题:
工业机器人的运动自由度数越多,灵活性越大,但其结构越复杂。球坐标式工业机器人手臂运动是( )个自由度。 A.3B.4C.5 D.6
第7题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.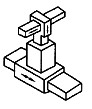
B.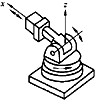
C.
D.
第8题:
A直角坐标机器人
B圆柱坐标式机器人
C球面坐标式机器人
D关节坐标式机器人
第9题:
下图中的4个工业机器人,( )代表的是球坐标式机器人。
A.
B.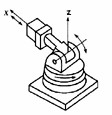
C.
D.