
工业机器人的自由度一般是4~6个。
第1题:
此题为判断题(对,错)。
第2题:
下列4个工业机器人的运动简图中,( )代表的是球坐标式机器人。
A.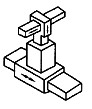
B.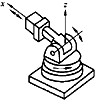
C.
D.
第3题:
此题为判断题(对,错)。
第4题:
A.3个
B.4个
C.5个
D.6个
第5题:
A.驱动方式
B.控制方式
C.作业目标
D.灵活程度
第6题:
此题为判断题(对,错)。
第7题:
A.六个
B.五个
C.八个
D.四个
第8题:
下图中的4个工业机器人,( )代表的是球坐标式机器人。
A.
B.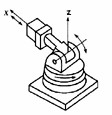
C.
D.
第9题:
A.型号
B.运动范围
C.自由度
D.承载能力
第10题:
A.其开合动作不计入机器人自由度
B.通用性差
C.是一个独立的部件
D.一般适合拾取多种类型的工件