第1题:
A、0
B、1
C、2
D、不确定
第2题:
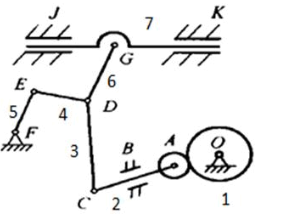
第3题:
A、0个
B、3个
C、4个
D、5个
第4题:
以下关于自由度的描述正确的有()
第5题:
第6题:
A.3
B.4
C.5
D.6
第7题:
第8题:
此题为判断题(对,错)。
第9题:
机构自由度的定义是什么?一个平面自由构件的自由度为多少?使机构具有确定运动所需输入的独立运动参数的数目称机构自由度。平面自由构件的自由度为3。略
第10题:
平面双销定位机构中,菱形销限制了工件的()
有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于()A、0B、1C、2
某平面机构含有5个低副和1个高副,自由度为1,则该机构有()个活动构件。A、2B、3C、4
问答题机构自由度的定义是什么?一个平面自由构件的自由度为多少?
平面低副的自由度为(),平面高副的自由度为()。
平面双销定位机构中,短菱形销限制了工件的()。A、1个自由度B、2个自由度C、3个自由度
平面机构中若引入一个高副将带入()个约束,而引入一个低副将带入()个约束。平面机构中约束数与自由度数的关系是_约束数+自由度数=3。
单选题平面机构具有确定运动的充分必要条件为:A 自由度大于零B 原动件数大于零C 原动件数大于自由度数D 原动件数等于自由度数且大于零解
某一平面连杆机构有5个低副,1个高副,机构自由度为1,则该机构有()个构件。A、3B、4C、5
平面机构自由度的计算公式为()A、3n-2PL-PHB、3n-PL-PHC、2n-PL-PHD、n-PL-PH
有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于()。A、0;B、1;C、2