第1题:
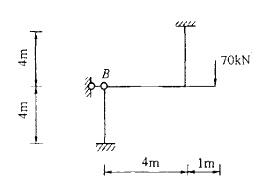
梁受力如下图所示,支座反力正确的是( )(假设支座反力以向上为正)。
A.RA=2kN,RB=-26kN
B.RA=-2kN,RB=26kN
C.RA=-3kN,RB=27kN
D.RA=-3kN,RB=-27kN
第2题:
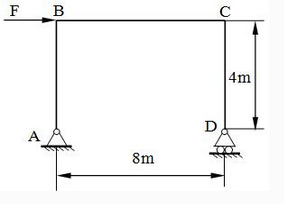
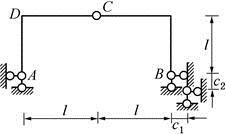
平面钢架受力如图所示,已知F=50kN,忽略钢架自重,求钢架A、D处的支座反力。

第3题:
某自治系统采用RIP协议,若该自治系统内的路由器RA收到其邻居路由器RB的距离矢量中包含信息<netl,16>,则可能得出的结论是 (24) 。 A.RB可以经过RA到达netl,跳数为l7 B.RB可以到达netl,跳数为l6 C.RA可以经过RB到达netl,跳数为l7 D.RA不能经过RB到达netl
第4题:

第5题:
第6题:
A.RB(IS)CF1(转向架1)
B.RB(IS)CF2(转向架2)
C.RB(IS)CF3(转向架3)
D.RB(IS)CF4(转向架4)
第7题:
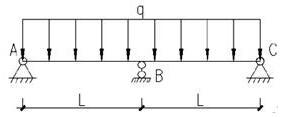
图示梁中支座A的反力(向上为正)RA=ql/2。()
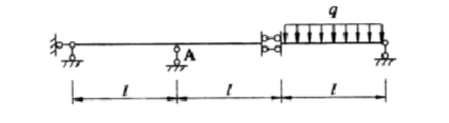
此题为判断题(对,错)。
第8题:
如果采用信令切换技术,信令可以在()发生切换。
A.RRC建立完成以后,RB建立之前
B.直传阶段
C.RB建立阶段
D.RB建立完成以后
第9题:


第10题: