
将J3轴马达从机器人上卸下,J3轴不会坠落。
第1题:
作业J1,J2,J3,J4的提交时间和运行时间见下表。若采用短作业优先调度算法,则作业调度次序为(18),平均周转时间为(19)分钟(这里不考虑操作系统的开销)。
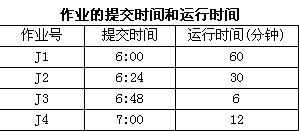
A.J1→J3→J4→J2
B.J4→J3→J2→J1
C.J3→J4→J2→J1
D.J1→J2→J3→J4
第2题:
作业J1,J2,J3的提交时间和运行时间如表2-1所示。若采用响应比高者优先调度算法,则作业调度次序为______。

A.J1→J2→J3
B.J1→J3→J2
C.J2→J1→J3
D.J2→J3→J1
第3题:
A.联动
B.传动
C.电机
D.自身重力
第4题:
热胶辊J3本身不带胶,工作时高速逆转。
第5题:
滚珠轴承有内、外环,滚珠轴承从轴上拆卸时,有时紧力偏大,用拆卸器拉的同时,允许用铜棒敲打振动外环,使轴承卸下。
第6题:
作业J1、J2、J3的提交时间和所需运行时间如表2-3所示。若采用响应比高者优先调度算法,则作业调度次序为(26)。
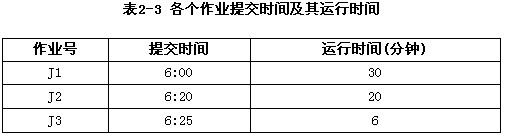
A.J1→J2→J3
B.J1→J3→J2
C.J2→J1→J3
D.J2→J3→J1
第7题:



第8题:
A.0轴
B.1轴
C.6轴
D.附加轴
第9题:
ROMAT工业机器人由六个自由度组合而成,三个定位自由度1~3轴和三个角度定向自由度4~6轴,此外,机器人系统还装备了大量的用来移动机器人或者工件的附加轴,这些轴被称为()7~12轴。
第10题:
轴J1、J2和J3的运动只有软件上的轴限位设置。