
在机器人程序编写过程中,下列各项描述错误的是()
第1题:
A.J
B.L
C.C
D.MOVES
第2题:
A.13
B.14
C.15
D.16
第3题:
关于新生儿及婴儿PR间期的描述,错误的是
A、PR间期与心率成正比
B、PR间期与年龄成正比
C、PR间期常<0.12s
D、PR间期<0.12s者占50%以上
E、以上都对
第4题:
如图7.3所示的树形文件系统中,方框表示目录,圆圈表示文件,“/”表示路径的分隔符,“/”在路径之首表示根目录。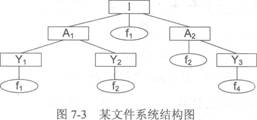 在图7.3中,假设当前目录是Al,“pr”表示打印命令,那么打印根目录中的文件fl的正确命令是 (9) 。 A.prAl/Yl/fl B.prYl/fl..C.pr../fl D.pr..fl
在图7.3中,假设当前目录是Al,“pr”表示打印命令,那么打印根目录中的文件fl的正确命令是 (9) 。 A.prAl/Yl/fl B.prYl/fl..C.pr../fl D.pr..fl
第5题:
此题为判断题(对,错)。
第6题:
A.基坐标系
B.轴坐标系
C.世界坐标系
D.机器人默认坐标系
第7题:
A.极坐标
B.关节坐标
C.工具坐标系
D.工件坐标系
第8题:
A.9
B.10
C.16
D.12
第9题:
如图2-5所示的树形文件系统中,方框表示目录,圆圈表示文件,“/”表示路径的分隔符,“/”在路径之首表示根目录。
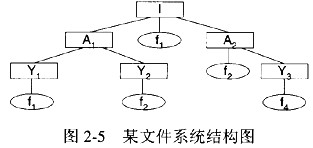
在图2-5中,假设当前目录是A1,“pr'’表示打印命令,那么打印根目录中的文件f1的正确命令是(23)。
A.pr A1/Y1/f1
B.pr Y1/f1
C.pr../f1
D.pr..f1
第10题:
能够完成机器人简单程序的编写与编辑以及机器人的启动与停止操作的是()
A.机器人控制柜
B.计算机控制系统
C.示教器
D.机器人编码控制器